

-
摘要: 提出了将总体最小二乘方法应用于联合平差的模型,推导了附有相对权比的总体最小二乘联合平差方法。采用了多种方案来确定相对权比的大小。以参数估值与真值的差值范数作为评价指标,分析比较了单一数据总体最小二乘平差和两类数据总体最小二乘联合平差的模拟算例;通过给各类数据加入不同大小的随机噪声,分析了判别函数最小化法中随机噪声大小对确定相对权比的影响。模拟算例表明,平差结果的质量与相对权比的选取有关;当先验信息准确时,验前单位权方差法的结果最好,而当先验信息不准确时,判别函数为
-
以总体最小二乘作为误差变量(errors-in-variables,EIV)模型的严密估计方法在大地测量领域已经得到了深入的研究[1-6]。随着空间数据的种类越来越多样化,如何有效地确定相对权比来统一各类数据,从而自适应调整各类观测数据对模型参数估值的贡献,成为解决联合平差问题的关键。文献[7]给出了大地测量、地震和地质三类数据的联合反演模式和水准测量、GPS和重力三种数据联合反演断层参数的具体公式,介绍了求解优化问题所有全局最优解的区间算法;文献[8]通过大地测量数据与地震数据的联合反演,提出了联合反演中确定相对权比的方法;文献[9-13]采用分组平差(序贯平差)方法,将观测向量分为多组,降低了矩阵求逆的阶数,但分组平差过程中,未对各组数据附加相对权比;文献[14]提出了一种确定联合反演中相对权比的两步法,通过赫尔默特方差分量估计对不同种类数据进行归一化,再建立顾及相对权比的联合反演模型求解;文献[15]基于赫尔默特方差分量估计公式提出了联合反演的序贯算法;面对参数间存在约束条件的问题,文献[16]提出了附加约束条件的序贯平差;文献[17]研究了等式约束反演和联合反演的反演模型及目标函数的构建方法。但上述联合平差方法均基于最小二乘原理展开,未能顾及到模型系数矩阵的误差,且实际应用中,系数矩阵往往是由含有误差的观测元素组成的。文献[18-20]从方差分量估计的角度出发,分别给出了不同的总体最小二乘方差分量估计方法,直接求解不同类数据的单位权方差,然而,当数据种类增多时其方差分量往往存在不可估性问题。
基于此,本文在各类数据各自等精度的条件下,提出了一种将总体最小二权方法用于联合平差的新方法。
1 总体最小二乘联合平差方法
设有两种不同类的观测数据,则总体最小二乘联合平差问题建立的函数模型为:

(1) 式中,L1∈Rn1×1为第Ⅰ类观测向量;e1为第Ⅰ类观测向量的随机误差;L2∈Rn2×1为第Ⅱ类观测向量;e2为第Ⅱ类观测向量的随机误差;B1∈Rn1×m为第Ⅰ类观测方程列满秩系数矩阵;EB1为系数矩阵B1的误差;B2∈Rn2×m为第Ⅱ类观测方程列满秩系数矩阵;EB2为系数矩阵B2的误差;X∈Rm×1为m×1待估参数向量。
联合平差的随机模型为:

(2) 式中,eB1和eB2分别是将矩阵EB1和EB2按列拉直得到的列向量;σ012和σ022分别为第Ⅰ类和第Ⅱ类观测值及系数矩阵元素的验前单位权方差;Im、In1、In2分别为m阶、n1阶和n2阶单位阵;vec(·)表示矩阵拉直运算;ⓧ表示Kronecker积。
将式(1) 改造,可得:

(3) 式中,

(4) 根据式(3) ,由协因数传播定律容易得到e1和e2的协因数阵[6]:

(5) 
(6) 令e1的平差值为V1,e2的平差值为V2,X的平差值为${\hat{X}}$ ,则式(3) 变为:

(7) 则总体最小二乘联合平差准则为:

(8) 式中,



(9) 由式(9) ,根据求函数自由极值的方法,得:

(10) 将式(7) 代入式(10) 得:

(11) 即

(12) 令


则有法方程:

(13) 解法方程,得:

(14) 式(14) 通过多次迭代可以得到较准确的参数解。
同理,将两类观测数据扩展到k类观测数据的一般情况,可得到k类数据条件下,总体最小二乘联合平差的参数估值:

(15) 式中,


2 相对权比τ的确定方法
在实际应用中,由于各类型的数据之间具有不同的单位权方差,且联合平差前各类数据元素定权不准确,为使总体最小二乘联合平差法合理,应考虑不同类数据的相对权比,本节以两种方法为例说明。
2.1 验前单位权方差法[6, 8, 14]
由函数模型(1) 和随机模型(2) 可知,两类数据的验前单位权方差分别为σ012和σ022,则总体最小二乘联合平差中相对权比τ为:

(16) 由迭代解算得到参数估值,计算步骤为:

(17) 
(18) 
(19) 当

(20) 时,计算结束。式中‖·‖表示向量的2范数。
可知,当σ022=σ012≠0时,τ=0.5,此时为不考虑相对权比的联合平差问题,也即视第Ⅰ类数据和第Ⅱ类数据在联合平差中所占的权重等同。
2.2 判别函数最小化法[6, 14]
选定一个步长,让权比例因子τ遍历整个取值区间,将每个τ的取值代入式(17) ~(20) 中计算,可得到对应联合平差的参数估值${\hat{X}}$,由式(7) 得到相应的V1和V2,可得判别函数的估值为:

(21) 把式(21) 中的最小值对应的相对权比τ和此时相对权比下的参数估值作为最终结果。其他常用的函数将在§3中具体讨论。
3 算例与分析
3.1 线性方程组算例
模拟一个线性参数估计问题,满足BtruetrueXtrue=Ltrue,其中Btrue、Ltrue为设计矩阵和观测值的真值,具体见表 1。模型参数的真值Xtrue=[111]T。现对前5组观测值向量和设计矩阵真值加入e1~N(0,σ2I)的噪声,其中σ012=0.5,作为第Ⅰ类平差数据;对后7组观测值向量和设计矩阵元素加入e2~N(0,σ022I)的噪声,其中σ022=0.1,作为第Ⅱ类平差数据;它们是分别采用① τ=1的总体最小二乘法; ② τ=0的总体最小二乘法; ③ τ=0.5的总体最小二乘联合平差法; ④ 验前单位权方差法,由(1-τ)/τ=σ012/σ022确定τ值; ⑤ =[τV1TV1+(1-τ)V2TV2]/(1+T)的判别函数最小化法; ⑥ =(V1TV1+V2TV2)/(1+T)的判别函数最小化法; ⑦ =V1TV1+V2TV2的判别函数最小化法; ⑧


 表 1 线性方程组观测向量和设计矩阵的真值Table 1. True Values of Observation Vectors and Design Matrice
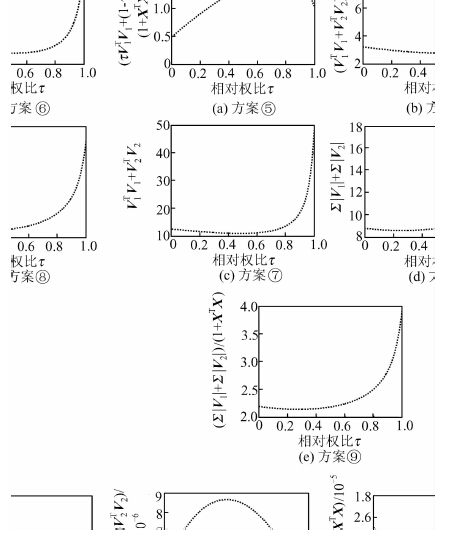
表 1 线性方程组观测向量和设计矩阵的真值Table 1. True Values of Observation Vectors and Design Matrice数据类型 Btrue Ltrue 2.0 -5.2 3.1 -0.1 3.6 4.5 2.9 5.2 I -1.5 6.8 3.4 8.7 4.0 7.3 -9.1 2.2 6.71 -3.3 -4.5 -1.09 10.4 12.7 -5.8 17.3 -5.5 -7.6 -2.1 -15.2 8.2 4.5 -9.0 3.7 II -4.2 -2.3 8.6 2.1 -2.3 11.5 4.0 13.2 7.4 3.6 -4.2 6.8 9.1 -7.1 2.0 4.0 对这9种方案模拟100次。在方案①~④中,由于相对权比事先给定,计算该相对权比下对应各方案的参数估值和差值范数,最后对100次计算结果取平均值;在方案⑤~⑨的判别函数最小化法计算时,由于τ是按一定的步长(本文中步长取0.001) 遍历整个取值区间的(τ∈(0,1) ,因联合反演故τ不取0和1[15]),为保证对应某一相对权比下取值的一致性,每模拟一次数据,便计算每个τ对应的参数估值和差值范数,在完成100次运算后,取各相对权比下计算结果的均值,并把均值结果中判别函数值取最小时对应的相对权比及在此相对权比下计算结果的均值作为最终值,参数平差结果见表 2。本文还绘制了方案⑤~⑨的判别函数与相对权比之间的关系,如图 1所示。
![]() 图 1 线性方程组算例各方案判别函数与相对比关系图Figure 1. Relationship Between Discriminate Function and Weight Scaling Factor in Linear Equation Group表 2 参数平差结果Table 2. Results of Inversion Parameters
图 1 线性方程组算例各方案判别函数与相对比关系图Figure 1. Relationship Between Discriminate Function and Weight Scaling Factor in Linear Equation Group表 2 参数平差结果Table 2. Results of Inversion Parameters方案 ${\hat{X}}$1 ${\hat{X}}$2 ${\hat{X}}$3 τ ‖Δ${\hat{X}}$‖ 真值 1.0000 1.0000 1.000 0 / / ① 1.037 0 1.023 4 1.044 3 1.000 0.380 7 ② 0.997 2 1.004 8 1.002 1 0.000 0.074 6 ③ 0.997 7 1.006 1 1.006 2 0.500 0.089 8 ④ 0.997 3 1.005 1 1.003 1 0.167 0.071 4 ⑤ 0.997 2 1.004 8 1.002 2 0.001 0.074 6 ⑥ 0.997 7 1.006 1 1.006 2 0.500 0.089 8 ⑦ 0.997 7 1.006 1 1.006 0 0.490 0.088 6 ⑧ 0.997 4 1.005 4 1.003 8 0.270 0.072 7 ⑨ 0.997 4 1.005 4 1.003 9 0.286 0.073 2 注:验前单位权方差法确定方案④的相对权比,(1-τ)/τ=0.5/0.1,即τ=0.167。‖Δ‖表示模型参数平差结果与真值差值的范数;τ为各方法计算的相对权比。 由表 2可知,由于数据量相对较少,数据精度相对较低,因此第I类数据的总体最小二乘平差结果最差(方案①);方案③对各类数据附加了相同的相对权比(τ=0.5) ,即视联合平差中各类数据的权重相等,因而结果相对较差;比较方案⑤与方案②,不难发现,若不加0<τ<1的限制,方案⑤与方案②等价,图 1(a)中散点图的最小值在最左端处取得,可见方案⑤的结果并没有起到权衡各类数据的作用;方案⑤与方案⑦也存在同样的问题,其判别函数求得的权比值为0.5和0.49,与实际值0.167相差较大,因而其解算结果较第II类数据的总体最小二乘平差结果要差(方案②),此时联合平差结果不如单一数据的平差结果;而方案⑧与方案⑨的结果则优于方案②,可见判别函数的选取对平差结果的影响很大。
3.2 坐标位移反演应变参数
在二维平面情况下,利用应变参数反演模型模拟生成反演应变参数的GPS坐标位移数据和边角网平差数据,其真值见表 3和表 4;坐标位移反演应变参数的公式为[21]:
序号 X/km Y/km u1/mm v1/mm 1 100.000 100.000 1.000 20.200 2 100.000 300.000 -1.000 18.600 3 100.000 500.000 -3.000 17.000 4 300.000 100.000 5.000 62.200 5 300.000 300.000 3.000 60.600 6 300.000 500.000 1.000 59.000 7 500.000 100.000 9.000 104.200 8 500.000 300.000 7.000 102.600 9 500.000 500.000 5.000 101.000 序号 X/km Y/km u2/mm v2/mm 1 100.000 100.000 1.000 20.200 2 100.000 600.000 -4.000 16.200 3 600.000 100.000 11.000 125.200 4 600.000 600.000 6.000 121.200 
(22) 式中,(xi,yi)为第i点近似坐标;ui为第i点纵坐标位移量;vi为第i点横坐标位移量;εx、εy分别为x、y轴方向上的线应变;γxy=2εxy为x、y方向上的剪应变;ω为转动惯量。
对GPS坐标数据及坐标位移真值加入e1~N(0,σ012I)的随机噪声,其中σ012=0.5 mm022;对边角网的坐标数据及位移真值加入e2~N(0,σ2I)的随机噪声,其中σ022=2.0 mm2,得到两类数据的模拟观测值。 采用表 2中的9种方案,模拟100次,按照§3.1中算例方法获得应变参数反演结果,见表 5。应变参数反演方案⑤~⑨的判别函数与相对权比之间的关系如图 2所示。
应变参数反演的算例中,方案⑥与方案⑦等价,且两方案所确定的相对权比与方案③相同,均为0.5,均未能合理反映每类数据在联合平差中的比重;而方案⑤确定的相对权比0.999(非常接近于1) ,其结果与方案①近似。可见在方案⑤下,联合平差退化为单一数据的总体最小二乘平差,这就意味着失去了联合平差的意义,显然不合理。
表 5 应变参数反演结果Table 5. Inversion Results of Model Parameters方案 ${\hat{\varepsilon }}$x/10-9 ${\hat{\varepsilon }}$ y/10-9 ${\hat{\varepsilon }}$ xy/10-9 ${\hat{\omega }}$/10-9 τ ‖Δ${\hat{X}}$‖ 真值 20.000 0 -8.000 0 100.000 0 110.000 0 / / 1 19.987 3 -7.808 4 99.954 9 109.932 7 1.000 1.691 5 2 20.270 4 -8.143 8 99.967 0 110.129 6 0.000 3.217 7 3 20.126 2 -7.972 4 99.961 8 110.039 4 0.500 1.845 7 4 20.042 6 -7.873 6 99.957 8 109.977 0 0.800 1.511 0 5 19.987 6 -7.808 8 99.954 9 109.932 9 0.999 1.689 9 6 20.126 2 -7.972 4 99.961 8 110.039 4 0.500 1.845 7 7 20.126 2 -7.972 4 99.961 8 110.039 4 0.500 1.845 7 8 20.092 4 -7.932 4 99.960 3 110.014 9 0.621 1.643 8 9 20.092 4 -7.932 4 99.960 3 110.014 9 0.621 1.6438 注:验前单位权方差法确定方案④的相对权比,(1-τ)/τ=0.5/2.0,即τ=0.8。 综合§3.1与§3.2中算例可知,两算例中验前单位权方差法(方案④)的差值范数最小,这与理论相符,这是因为给定的相对权比为实际权比;然而,在实际数据处理过程中,当验前随机模型不准确时,观测数据对参数解贡献的比重将不再合理,所以验前单位权方差法并不具备操作性;相比较而言,方案⑧与方案⑨的平差结果是判别函数最小化中最好的,从图 1(c)、1(d)和图 2(c)、2(d)中不难发现,其取得最小值的点相对接近各自的实际权比值,因此,在先验信息不准确时,采用以方案⑧、方案⑨为判别函数的判别函数最小化法可以取得更为有效的结果。
![]() 图 2 应变参数反演各方案判别函数与相对比的关系图Figure 2. Relationship Between Discriminate Function and Weight Scaling Factor in Strain Parameters
图 2 应变参数反演各方案判别函数与相对比的关系图Figure 2. Relationship Between Discriminate Function and Weight Scaling Factor in Strain Parameters为了进一步探究加入的随机噪声对确定相对权比的影响,对§3.1和§3.2中算例模拟加入不同大小的随机噪声做模拟计算,结果见表 6、表 7。
表 6 §3.1中算例不同精度对确定相对权比的影响Table 6. Influence to theWeight Scaling Factor Determined by Adding Different Noise to Example in §3.1σ012 σ022 相对权比τ 方案⑤ 方案⑥ 方案⑦ 方案⑧ 方案⑨ 0.5 0.000 5 0.001 0.500 0.494 0.260 0.270 0.5 0.001 0.001 0.500 0.483 0.350 0.380 0.5 0.005 0.001 0.500 0.497 0.720 0.720 0.5 0.01 0.001 0.500 0.497 0.131 0.131 0.5 0.05 0.001 0.500 0.486 0.169 0.183 0.5 0.1 0.001 0.500 0.490 0.270 0.286 0.1 0.1 0.999 0.500 0.499 0.441 0.441 0.05 0.1 0.999 0.500 0.502 0.480 0.473 0.01 0.1 0.999 0.500 0.500 0.685 0.688 0.005 0.1 0.999 0.500 0.500 0.746 0.749 0.0005 0.1 0.999 0.500 0.500 0.869 0.873 σ012、σ022分别代表第I、II类数据的单位权方差。 表 7 §3.2中算例不同精度对确定相对权比的影响Table 7. Influence to the Weight Scaling Factor Determined by Adding Different Noise to Example in §3.2σ012 σ022 相对权比τ 方案⑤ 方案⑥ 方案⑦ 方案⑧ 方案⑨ 0.000 5 2.0 0.999 0.500 0.500 0.984 0.984 0.005 2.0 0.999 0.500 0.500 0.953 0.953 0.01 2.0 0.999 0.500 0.500 0.926 0.926 0.05 2.0 0.999 0.500 0.500 0.863 0.863 0.1 2.0 0.999 0.500 0.500 0.826 0.826 0.5 2.0 0.999 0.500 0.500 0.676 0.676 0.5 0.5 0.001 0.500 0.500 0.472 0.472 0.5 0.1 0.001 0.500 0.500 0.280 0.280 0.5 0.01 0.001 0.500 0.500 0.102 0.102 0.5 0.001 0.001 0.500 0.500 0.043 0.043 0.5 0.000 1 0.001 0.500 0.500 0.016 0.016 σ012、σ022分别代表GPS数据和边角网数据的单位权方差。 不难发现,对于方案⑤,随着各类数据加入的误差不同,其判别函数永远在两端处取到最小值。可见在不同的观测数据精度下,判别函数Φ=[τV1TV1+(1-τ)V2TV2]/(1+T)所确定的相对权比本身不能很好地拟合各类数据,因而其相对权比的取值与其他各方案的差别较大;而方案⑥、方案⑦的相对权比保持在0.5及附近,并没有起到权衡各类数据的作用;随着各类数据加入的误差不同,两算例中方案⑧与方案⑨所确定的相对权比相差不大,且比较靠近实际的相对权比值,结果更能反映实际情况,可知联合平差中权比例关系在求解模型参数中起着很重要的作用;但并不能以相对权比的大小来评价方案的好坏[22]。
4 结 语
本文将总体最小二乘方法应用于联合平差问题,推导了附有相对权比的总体最小二乘联合平差方法,并推广得到了多类数据情况下的一般平差计算公式。相对权比的确定是联合平差中求 解参数的关键,本文在两类数据各自等精度的前提下,分析了多种判别函数确定相对权比的方法,并对比了各自权比下的解算结果。然而本文在模拟算例中假设两类数据各自是等精度的,对于不等精度情况下的总体最小二乘联合平差还需要进一步研究,同时对于相对权比的确定方法也需要通过实际应用进一步验证和改进。
-
![]()
图 1 线性方程组算例各方案判别函数与相对比关系图
Figure 1. Relationship Between Discriminate Function and Weight Scaling Factor in Linear Equation Group
![]()
图 2 应变参数反演各方案判别函数与相对比的关系图
Figure 2. Relationship Between Discriminate Function and Weight Scaling Factor in Strain Parameters
表 1 线性方程组观测向量和设计矩阵的真值
Table 1 True Values of Observation Vectors and Design Matrice
数据类型 Btrue Ltrue 2.0 -5.2 3.1 -0.1 3.6 4.5 2.9 5.2 I -1.5 6.8 3.4 8.7 4.0 7.3 -9.1 2.2 6.71 -3.3 -4.5 -1.09 10.4 12.7 -5.8 17.3 -5.5 -7.6 -2.1 -15.2 8.2 4.5 -9.0 3.7 II -4.2 -2.3 8.6 2.1 -2.3 11.5 4.0 13.2 7.4 3.6 -4.2 6.8 9.1 -7.1 2.0 4.0  下载: 导出CSV
下载: 导出CSV
表 2 参数平差结果
Table 2 Results of Inversion Parameters
方案 ${\hat{X}}$1 ${\hat{X}}$2 ${\hat{X}}$3 τ ‖Δ${\hat{X}}$‖ 真值 1.0000 1.0000 1.000 0 / / ① 1.037 0 1.023 4 1.044 3 1.000 0.380 7 ② 0.997 2 1.004 8 1.002 1 0.000 0.074 6 ③ 0.997 7 1.006 1 1.006 2 0.500 0.089 8 ④ 0.997 3 1.005 1 1.003 1 0.167 0.071 4 ⑤ 0.997 2 1.004 8 1.002 2 0.001 0.074 6 ⑥ 0.997 7 1.006 1 1.006 2 0.500 0.089 8 ⑦ 0.997 7 1.006 1 1.006 0 0.490 0.088 6 ⑧ 0.997 4 1.005 4 1.003 8 0.270 0.072 7 ⑨ 0.997 4 1.005 4 1.003 9 0.286 0.073 2 注:验前单位权方差法确定方案④的相对权比,(1-τ)/τ=0.5/0.1,即τ=0.167。‖Δ‖表示模型参数平差结果与真值差值的范数;τ为各方法计算的相对权比。
下载: 导出CSV
序号 X/km Y/km u1/mm v1/mm 1 100.000 100.000 1.000 20.200 2 100.000 300.000 -1.000 18.600 3 100.000 500.000 -3.000 17.000 4 300.000 100.000 5.000 62.200 5 300.000 300.000 3.000 60.600 6 300.000 500.000 1.000 59.000 7 500.000 100.000 9.000 104.200 8 500.000 300.000 7.000 102.600 9 500.000 500.000 5.000 101.000
下载: 导出CSV
序号 X/km Y/km u2/mm v2/mm 1 100.000 100.000 1.000 20.200 2 100.000 600.000 -4.000 16.200 3 600.000 100.000 11.000 125.200 4 600.000 600.000 6.000 121.200
下载: 导出CSV
表 5 应变参数反演结果
Table 5 Inversion Results of Model Parameters
方案 ${\hat{\varepsilon }}$x/10-9 ${\hat{\varepsilon }}$ y/10-9 ${\hat{\varepsilon }}$ xy/10-9 ${\hat{\omega }}$/10-9 τ ‖Δ${\hat{X}}$‖ 真值 20.000 0 -8.000 0 100.000 0 110.000 0 / / 1 19.987 3 -7.808 4 99.954 9 109.932 7 1.000 1.691 5 2 20.270 4 -8.143 8 99.967 0 110.129 6 0.000 3.217 7 3 20.126 2 -7.972 4 99.961 8 110.039 4 0.500 1.845 7 4 20.042 6 -7.873 6 99.957 8 109.977 0 0.800 1.511 0 5 19.987 6 -7.808 8 99.954 9 109.932 9 0.999 1.689 9 6 20.126 2 -7.972 4 99.961 8 110.039 4 0.500 1.845 7 7 20.126 2 -7.972 4 99.961 8 110.039 4 0.500 1.845 7 8 20.092 4 -7.932 4 99.960 3 110.014 9 0.621 1.643 8 9 20.092 4 -7.932 4 99.960 3 110.014 9 0.621 1.6438 注:验前单位权方差法确定方案④的相对权比,(1-τ)/τ=0.5/2.0,即τ=0.8。
下载: 导出CSV
表 6 §3.1中算例不同精度对确定相对权比的影响
Table 6 Influence to theWeight Scaling Factor Determined by Adding Different Noise to Example in §3.1
σ012 σ022 相对权比τ 方案⑤ 方案⑥ 方案⑦ 方案⑧ 方案⑨ 0.5 0.000 5 0.001 0.500 0.494 0.260 0.270 0.5 0.001 0.001 0.500 0.483 0.350 0.380 0.5 0.005 0.001 0.500 0.497 0.720 0.720 0.5 0.01 0.001 0.500 0.497 0.131 0.131 0.5 0.05 0.001 0.500 0.486 0.169 0.183 0.5 0.1 0.001 0.500 0.490 0.270 0.286 0.1 0.1 0.999 0.500 0.499 0.441 0.441 0.05 0.1 0.999 0.500 0.502 0.480 0.473 0.01 0.1 0.999 0.500 0.500 0.685 0.688 0.005 0.1 0.999 0.500 0.500 0.746 0.749 0.0005 0.1 0.999 0.500 0.500 0.869 0.873 σ012、σ022分别代表第I、II类数据的单位权方差。
下载: 导出CSV
表 7 §3.2中算例不同精度对确定相对权比的影响
Table 7 Influence to the Weight Scaling Factor Determined by Adding Different Noise to Example in §3.2
σ012 σ022 相对权比τ 方案⑤ 方案⑥ 方案⑦ 方案⑧ 方案⑨ 0.000 5 2.0 0.999 0.500 0.500 0.984 0.984 0.005 2.0 0.999 0.500 0.500 0.953 0.953 0.01 2.0 0.999 0.500 0.500 0.926 0.926 0.05 2.0 0.999 0.500 0.500 0.863 0.863 0.1 2.0 0.999 0.500 0.500 0.826 0.826 0.5 2.0 0.999 0.500 0.500 0.676 0.676 0.5 0.5 0.001 0.500 0.500 0.472 0.472 0.5 0.1 0.001 0.500 0.500 0.280 0.280 0.5 0.01 0.001 0.500 0.500 0.102 0.102 0.5 0.001 0.001 0.500 0.500 0.043 0.043 0.5 0.000 1 0.001 0.500 0.500 0.016 0.016 σ012、σ022分别代表GPS数据和边角网数据的单位权方差。
下载: 导出CSV
-
[1] Schaffrin B, Wieser A. On Weighted Total Least Squares Adjustment for Linear Regression[J]. Journal of Geodesy, 2008, 82(7):415-421 doi: 10.1007/s00190-007-0190-9
[2] 王乐洋, 许才军, 温扬茂. 利用STLN和InSAR数据反演2008年青海大柴旦Mw 6.3级地震断层参数[J]. 测绘学报, 2013, 42(2):168-176 Wang Leyang, Xu Caijun, Wen Yangmao. Fault Parameters of 2008 Qinghai Dacaidan Mw 6.3 Earthquake from STLN Inversion and InSAR Data[J]. Acta Geodaetica et Cartographica Sinica, 2013, 42(2):168-176
[3] Mahboub V. On Weighted Total Least Squares for Geodetic Transformation[J]. Journal of Geodesy, 2012, 86(5):359-367 doi: 10.1007/s00190-011-0524-5
[4] 王乐洋. 基于总体最小二乘的大地测量反演理论及应用研究[D]. 武汉:武汉大学, 2011 http://cn.bing.com/academic/profile?id=2614154453&encoded=0&v=paper_preview&mkt=zh-cn Wang Leyang. Research on Theory and Application of Total Least Squares in Geodetic Inversion[D]. Wuhan:Wuhan University, 2011 http://cn.bing.com/academic/profile?id=2614154453&encoded=0&v=paper_preview&mkt=zh-cn
[5] Amiri-Simkooei A, Jazaeri S. Weighted Total Least Squares Formulated by Standard Least Squares Theory[J]. Journal of Geodetic Science,2012,2:113-124 http://cn.bing.com/academic/profile?id=2032082196&encoded=0&v=paper_preview&mkt=zh-cn
[6] 王乐洋,许才军.附有相对权比的总体最小二乘平差[J].武汉大学学报·信息科学版, 2011,36(8):887-894 http://ch.whu.edu.cn/CN/abstract/abstract629.shtml Wang Leyang, Xu Caijun. Total Least Square Adjustment with Weight Scaling Factor[J]. Geomatics and Information Science of Wuhan University,2011,36(8):887-894 http://ch.whu.edu.cn/CN/abstract/abstract629.shtml
[7] 李爽,许才军,王新洲.论述多种数据联合反演的模式及算法[J].大地测量与地球动力学,2002,22(3):78-82 http://www.cnki.com.cn/Article/CJFDTOTAL-DKXB200203020.htm Li Shuang, Xu Caijun, Wang Xinzhou. Models and Algorithms of Joint Inversion with Verious Kind of Data[J].Journal of Geodesy and Geodynamics,2002,22(3):78-82 http://www.cnki.com.cn/Article/CJFDTOTAL-DKXB200203020.htm
[8] Xu Caijun, Ding Kaihua, Cai Jiangqiang, et al. Methods of Determining Weight Scaling Factors for Geodetic-geophysical Joint Inversion[J]. Journal of Geodynamics, 2009,47(1):39-46 doi: 10.1016/j.jog.2008.06.005
[9] 高士纯.附有限制条件的间接分组平差模型与公式[J]. 武汉测绘科技大学学报, 1996,21(1):36-40 http://www.cnki.com.cn/Article/CJFDTOTAL-WHCH601.006.htm Gao Shichun. A Model and the Formulae for Successive Adjustment with Restrictive Conditions[J]. Journal of Wuhan Technical University of Surveying and Mapping, 1996,21(1):36-40 http://www.cnki.com.cn/Article/CJFDTOTAL-WHCH601.006.htm
[10] 曾安敏,张丽萍. 多种序贯平差方法的比较[J]. 大地测量与地球动力学, 2007,27(2):84-88 http://www.cnki.com.cn/Article/CJFDTOTAL-DKXB200702015.htm Zeng Anmin, Zhang Liping. Comparison Among Several Sequential Adjustment Methods[J]. Journal of Geodesy and Geodynamics, 2007,27(2):84-88 http://www.cnki.com.cn/Article/CJFDTOTAL-DKXB200702015.htm
[11] 隋立芬,刘雁雨,王威.自适应序贯平差及其应用[J].武汉大学学报·信息科学版, 2007,32(1):51-54 http://ch.whu.edu.cn/CN/abstract/abstract1797.shtml Sui Lifen, Liu Yanyu, Wang Wei. Adaptive Sequential Adjustment and Its Application[J]. Geomatics and Information Science of Wuhan University,2007,32(1):51-54 http://ch.whu.edu.cn/CN/abstract/abstract1797.shtml
[12] 张丽萍. 多因子自适应序贯平差[J].测绘科学,2008,33(1):71-74 http://www.cnki.com.cn/Article/CJFDTOTAL-CHKD200801024.htm Zhang Liping. Adaptive Sequential Adjustment with Multi-adaptive Factors[J]. Science of Surveying and Mapping, 2008,33(1):71-74 http://www.cnki.com.cn/Article/CJFDTOTAL-CHKD200801024.htm
[13] 夏敬潮,孙茂军,何书镜,等. 基于等价观测理论的序贯平差模型[J]. 测绘地理信息, 2013,38(4):31-32 http://www.cnki.com.cn/Article/CJFDTOTAL-CHXG201304011.htm Xia Jingchao, Sun Maojun, He Shujing, et al. Sequential Least Squares Model Based on the Theory of Equivalent Observation[J]. Journal of Geomatics, 2013,38(4):31-32 http://www.cnki.com.cn/Article/CJFDTOTAL-CHXG201304011.htm
[14] 王乐洋,许才军,张朝玉.一种确定联合反演中相对权比的两步法[J].测绘学报,2012, 41(1):19-24 http://www.cnki.com.cn/Article/CJFDTOTAL-CHXG201304011.htm Wang Leyang, Xu Caijun, Zhang Chaoyu. A Two-step Method to Determine Relative Weight Ratio Factors in Joint Inversion[J]. Acta Geodaetica et Cartographica Sinica,2012,41(1):19-24 http://www.cnki.com.cn/Article/CJFDTOTAL-CHXG201304011.htm
[15] 张朝玉,许才军. 具有自适应权比的大地测量联合反演序贯算法及其应用[J]. 武汉大学学报·信息科学版, 2012,37(10):1140-1145 http://ch.whu.edu.cn/CN/abstract/abstract353.shtml Zhang Chaoyu, Xu Caijun. Sequential Algorithm of Geodesy Joint Inversion with Auto-match Weight Ratio and Its Application[J]. Geomatics and Information Science of Wuhan University, 2012,37(10):1140-1145 http://ch.whu.edu.cn/CN/abstract/abstract353.shtml
[16] 曾安敏, 杨元喜,欧阳桂崇. 附加约束条件的序贯平差[J].武汉大学学报·信息科学版,2008,33(2):183-186 http://ch.whu.edu.cn/CN/abstract/abstract1551.shtml Zeng Anmin,Yang Yuanxi,Ouyang Guichong. Sequential Adjustment with Constraints Among Parameters[J]. Geomatics and Information Science of Wuhan University,2008,33(2):183-186 http://ch.whu.edu.cn/CN/abstract/abstract1551.shtml
[17] 王乐洋,许才军.等式约束反演与联合反演的对比研究[J].大地测量与地球动力学, 2009, 29(1):74-78 http://www.cnki.com.cn/Article/CJFDTOTAL-DKXB200901015.htm Wang Leyang, Xu Caijun. Comparative Research on Equality Constraint Inversion and Joint Inversion[J]. Journal of Geodesy and Geodynamics, 2009, 29(1):74-78 http://www.cnki.com.cn/Article/CJFDTOTAL-DKXB200901015.htm
[18] Amiri-Simkooei A R. Application of Least Squares Variance Component Estimation to Errors-in-Variables Models[J]. Journal of Geodesy, 2013,87(10-12):935-944 doi: 10.1007/s00190-013-0658-8
[19] Xu Peiliang,Liu Jingnan.Variance Components in Errors-in-Variables Models:Estimability, Stability and Bias Analysis[J].Journal of Geodesy, 2014,88(8):719-734 doi: 10.1007/s00190-014-0717-9
[20] Mahboub V. Variance Component Estimation in Errors-in-Variables Models and a Rigorous Total Least-Squares Approach[J].Studia Geophysica et Geodaetica, 2014, 58(1):17-40 doi: 10.1007/s11200-013-1150-x
[21] 陶本藻. 自由网平差与变形分析[M]. 武汉:武汉测绘科技大学出版社,2000 Tao Benzao. Adjustment of Free Network and Deformation Analysis[M]. Wuhan:Wuhan Technology University of Surveying and Mapping Press, 2000
[22] 王乐洋, 于冬冬. 病态总体最小二乘问题的虚拟观测解法[J]. 测绘学报, 2014, 43(6):575-581 http://www.cnki.com.cn/Article/CJFDTOTAL-CHXB201406006.htm Wang Leyang, Yu Dongdong. Virtual Observation Method to Ill-posed Total Least Squares Problem[J]. Acta Geodaetica et Cartographica Sinica,2014,43(6):575-581 http://www.cnki.com.cn/Article/CJFDTOTAL-CHXB201406006.htm
-
期刊类型引用(7)
1. 陈丽,王岩,邵德盛. 病态加权最小二乘混合模型的k-Liu估计解法. 统计与决策. 2024(08): 17-21 .  百度学术
百度学术
2. 史浩伟,俞克豪,李丽华,李淑慧,杨红磊,罗士淇. 顾及坐标精度的地球自转参数联合解算方法研究. 测绘科学. 2024(03): 1-7 . 百度学术
3. 郭春喜,郭鑫伟,聂建亮,王斌,刘晓云,王海涛. 利用GNSS水准成果融合构建中国大陆垂直运动模型. 武汉大学学报(信息科学版). 2023(04): 579-586 . 百度学术
4. 宋迎春,宋采薇,左廷英. 带有界不确定性的加权混合估计方法. 武汉大学学报(信息科学版). 2020(07): 949-955 . 百度学术
5. 王乐洋,余航. 附有相对权比的加权总体最小二乘联合平差方法. 武汉大学学报(信息科学版). 2019(08): 1233-1240 . 百度学术
6. 吴光明,鲁铁定. 病态总体最小二乘靶向奇异值修正法. 大地测量与地球动力学. 2019(08): 856-862 . 百度学术
7. 王乐洋,余航. 火山Mogi模型反演的总体最小二乘联合平差方法. 武汉大学学报(信息科学版). 2018(09): 1333-1341 . 百度学术
其他类型引用(6)

计量
- 文章访问数: 2156
- HTML全文浏览量: 85
- PDF下载量: 394
- 被引次数: 13






