

-
摘要: 在激光干涉绝对重力仪的研制中,每次测量落体都要自由下落7~20 cm的距离,在此过程中地表重力垂直梯度引入的误差最高可达60×10-8 m/s2。因此,需要计算出每次测量值对应的测量高度,即在该位置时,落体运动的距离内重力垂直梯度对绝对重力测量值的综合误差为零。基于对落体下落运动方程的分析,提出一了种新的绝对重力仪测量高度的计算方法。对比发现,当起始计算时间较小并接近于0(小于0.015 s)时,该算法与已有的算法结果具有较好的一致性,最大偏差不大于3 mm,梯度归算误差不大于1×10-8 m/s2(μGal)。在仪器自主研发的过程中,当起始计算时间较长(大于0.015 s)时,该算法可以更合理地计算绝对重力测量值对应的测量高度。Abstract: In the design of laser interference absolute gravimeters, the falling-body for each measurement needs to freely fall about 7-20 cm along the vertical direction, corresponding to a gradient error up to 60 μGal. So the measurement-height must be computed where the combined effect of the gravity gradient is equal to zero. This paper bases on the analysis for the equation of the falling-body movement and proposes a new algorithm to calculate the measurement-height of the absolute gravimeter. From the comparison with other algorithms we could find:(1) if the beginning time of the trajectory is close to zero(less than 0.015 s), the measurement height of the absolute gravimeters using our algorithm coincides to the other algorithms, with the maximum deviation less than 3 mm and the gradient error less than 1 μGal; (2) during the process of independent research and development, if the beginning time of the trajectory is more than zero(0.015 s or even longer), the measurement height calculated by our algorithm is more reasonable.
-
激光干涉绝对重力仪是基于迈克尔逊干涉测量原理来测量测点重力加速度绝对值的高精度仪器[1]。在真空系统中, 自由下落运动的落体和参考棱镜分别构成干涉仪的两个臂,落体相对于参考棱镜的位移每变化半个激光波长,就会形成一条干涉条纹,激光干涉绝对重力仪的原理即是通过对干涉条纹的数据处理,重构落体自由下落的运动轨迹,拟合求解出测点地表垂直向重力加速度[2, 3]。
随着精密机械、电子技术和激光技术的不断进步,目前国际上高精度绝对重力仪的研发技术快速发展,多家科研团体基于激光干涉或原子干涉原理开展绝对重力测量仪器的研究,构造实验样机并积极参与到国际绝对重力比对活动中[4, 5]。但目前全球仅有美国Micro-G公司提供商用高精度绝对重力仪FG-5、FG5-X和A10,前两者在稳定测量环境中的准确度为1~2 μGal(1 μGal=10-8 m/s2)[6],而更适用于野外观测的A10测量准确度为±10 μGal[7]。这些绝对重力仪已广泛应用于资源探测[8]、导弹制导[9]、地震学[10, 11]、火山活动监测[12]、海平面升降监测[13]、相对重力仪标定[14]等科学技术领域。
在绝对重力的仪测量过程中,单次测量时一般先假定地表重力垂直梯度为零,再对最后测量结果进行重力垂直梯度误差修正。对于位移均分的情况,由于落体开始自由下落时速率较低,故起始位置的选择不需要太严格,即使在极端条件下测点垂直向重力梯度非线性分布的地区,也不会明显影响测量结果[15]。但在最后进行重力梯度误差修正的时候,应掌握测量结果对应的精确高度,即仪器的测量高度,以便通过重力垂直梯度测量将绝对重力测量结果归算到任意高度位置,进行仪器间的比对。
对于绝对重力仪的测量高度,不同设计原理的仪器相差很大,甚至同一套仪器在同一测点不同的安装架设对应的测量高度也会有cm量级的不同,这可能引入多达数十μGal的重力垂直梯度归算误差。故在进行绝对重力测量时, 首先要确定仪器架设完成后测量结果对应的测量高度,以便对最终测量结果进行重力垂直梯度修正,从而对不同仪器在同一测点测量结果和同一套仪器不同次测量结果之间进行对比。
Zumberge[16]、Niebauer[17]和Timmen[18]分别提出了针对激光干涉绝对重力仪测量高度的计算方法,这3种算法一个共有的重要前提条件是落体起始下落速度较小,但是算法中没有给出这个小速度的具体量化指标。在自主研发绝对重力仪的过程中发现,在落体自由下落的起始阶段,由于干涉信号受干扰一般比较严重,需要舍弃较长时间的干涉条纹。即起始计算时间较长,一般在50 ms左右,对应落体的速度为0.49 m/s。如果直接套用已有的算法,引入的重力垂直梯度修正误差较大。
本文通过对落体下落运动方程和重力垂直梯度效应的综合分析,提出了一种新的确定绝对重力仪器测量结果对应测量高度的计算方法。与已有的算法对比,该算法在开始计算时落体下落速度较小(起始计算时间0~0.015 s,对应落体的速度为0~0.147 m/s)的前提下,与已有算法结果吻合较好,且落体初始下落速度较大的情况下仍能计算出合理的仪器测量高度。相比于其他算法,本文算法不需要知道重力垂直梯度、精确的重力加速度等参数,仅需要测量过程中的起始、结束时间即可精确计算仪器的测量高度,需要参数少, 精度高,可以比较方便地用于仪器测量高度的确定。
1 仪器测量高度计算原理
1.1 仪器测量高度的定义
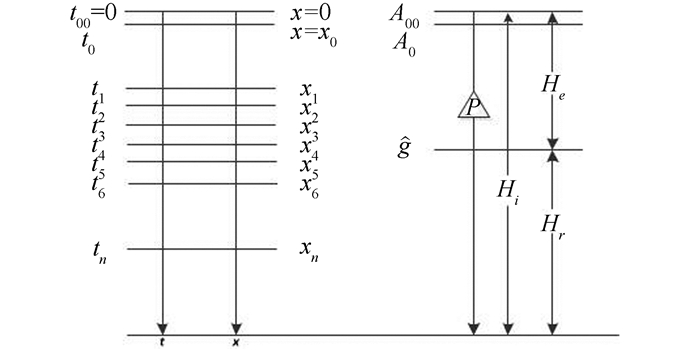
如图 1所示,高真空环境下,落体P在A00位置开始被释放,在A0位置处进入自由飞行状态。落体在A00处对应的时刻t00=0,位移x=0;在A0位置处,对应的时刻为t0,位移为x0。由于A00和A0两个位置相差很近,同时落体在二者之间的运动速度接近于0,故在实际计算时可以认为落体是从A0位置开始自由下落运动。下落过程中通过提取落体下落轨迹上的时间位移点(t1,x1),(t2,x2)…(tn,xn),用最小二乘拟合算法计算出落体的加速度,即所测量的测点重力加速度的测量值ĝ[19]。
将地表垂直向重力梯度γ引入落体运动方程之后,考虑跟高度h相关的重力加速度误差,对于落体下落距离为20 cm的绝对重力仪,测量过程中重力加速度的变化量达到60 μGal。
如果在落体下落的距离内,设定有效高度为He,落体在高于He运动时重力垂直梯度对测量结果的影响为负,低于He时影响为正,那么在He处重力垂直梯度对测量结果的综合误差为0,即测量值对应的是在He处的测点重力加速度测量值。因此,可以在计算重力加速度的过程中,先假定地表重力垂直梯度为0,计算有效高度He,测量测点垂直向重力梯度值,再对测量结果进行重力垂直梯度误差修正,得到测点He位置处的重力加速度测量值。
如果定义绝对重力测量值对应的位置相对于地面的高度是仪器测量高度Hr,可表达为:
$$ {H_r} = {H_i} - {H_e} $$ 式中,Hr为仪器测量结果对应的高度,称为仪器的“测量高度”;Hi为仪器安装完成后,落体开始下落的起始位置A0相对于地面的距离,称为“仪器高度”,在仪器设计阶段和安装阶段通过测量确定;He为落体下落距离内重力梯度对落体的综合效应为0的位置,是相对于落体下落起始位置A0之间的距离,称为“有效高度”,是计算仪器测量高度的唯一未知量。
由此可见,要得到仪器的测量高度Hr,就必须确定落体下落的有效高度He。对于测量高度的确定,目前的算法主要有以下3种(设定落体自由下落的距离是Z)。
1) Zumberge[16]确定了有效测量高度He= $ \frac{Z}{3}$,则仪器的测量高度为Hr=Hi-$\frac{Z}{3} $。该公式对于小初速度和位移均分情况适用。
2) Niebauer[17]确定了有效测量高度He= $\frac{4Z}{15} $,则仪器的测量高度为Hr=Hi-$\frac{4Z}{15} $。该公式确定有效测量高度的误差在2~5 mm, 同样仅仅对小初速度和位移均分情况适用。
3) Timmen[18]给出的确定有效高度公式为:
$$ {H_e} = \frac{{Av^4_0T + Bv^3_0{g_0}{T^2} + Cv^2_0g^2_0{T^3} + D{v_0}g^3_0{T^4} + Eg^4_0{T^5}}}{{Fv^3_0 + Gv^2_0{g_0}T + H{v_0}g^2_0{T^2} + Ig^3_0{T^3}}} $$ (1) 式中,A=56.0;B=102.4;C=61.2;D=14.0;E=1.0;F=112.0;G=168.0;H=67.2;I=5.6;g0≈9.81 m·s-1;v0≈v0*+$\frac{5}{84} $T3γg0≈v0*; v0*为有效高度处落体自由下落速度。
式(1)中,各项系数A、B、C、D、E、F、G、H、I基于MAPLE程序开发包求解方程给出,其值通过数值分析确定[20];v0为落体开始进行自由下落时的速度,用v0=g0·t0表达;t0为计数开始时刻;g0为落体初始下落位置的重力加速度值,由于对仪器测量高度的精度要求在0.1 mm量级,g0一般取9.81 ms-1。
当落体的有效高度确定后,仪器的测量高度可以表达为Hr=Hi-He。
1.2 仪器测量高度计算算法推导
在实际工作中,当初速度虽然很小但是不能忽略时,前述算法已不适用,需要提出新的绝对重力测量值对应的测量高度求解算法。
设落体下落的初始位置为A0,重力加速度为g0,地表垂直向重力梯度为γ,落体自由下落的运动方程可以表示为:
$$ \frac{{{{\rm{d}}^2}h}}{{{\rm{d}}{t^2}}} = \gamma h + {g_0} $$ (2) 根据假设落体初始位置的时间、位移为0,解方程(2)可得:
$$ h = \frac{1}{2}{g_0}{t^2} + \frac{\gamma }{{24}}{g_0}{t^4} $$ (3) 如果仪器的测量结果ĝ对应的位置在有效高度He处,考虑地表重力梯度修正,则有:
$$ \hat g = {g_0} + \gamma {H_e} $$ (4) 再考虑测量结果ĝ对应落体下落的起始时间和结束时间为t1和t2,即可认为测量结果ĝ是这个时间段内重力场平均作用与落体的结果,考虑式(4),以积分形式表达为:
$$ \hat g = (\frac{1}{{{t_2} - {t_1}}})\int_{t1}^{t2} {\left( {{g_0} + \gamma h} \right)} {\rm{d}}t $$ (5) 计算过程中,认为地表垂直向重力梯度为0,将γ=0代入式(3),然后将式(3)代入式(5)求解可以得到:
$$ \hat g = {g_0} + [\frac{1}{6}\left( {t^2_1 + t^2_2 + {t_1}{t_2}} \right){g_0}]\gamma $$ (6) 对比式(4)和式(6)可以得到有效高度的表达式:
$$ {H_e} = \frac{1}{6}(t^2_1 + t^2_2 + {t_1}{t_2}){g_0} $$ (7) 再根据式(1)可得绝对重力仪器测量高度的表达式为:
$$ \begin{array}{*{20}{l}} {H_r} =& {H_i} - {H_e} = \\ &{{H_i} - \frac{1}{6}\left( {t^2_1 + t^2_2 + {t_1}{t_2}} \right){g_0}} \end{array} $$ (8) 2 测量高度算法实验验证
2.1 起始计算时刻为0时各算法计算结果对比
对比结果见表 1。表 1中,初始重力加速度g0为9.8 m/s2, 仪器高度Hi为0.8 m。表 1中的计算假设落体下落初速度为0,即从0时刻开始到0.128 s结束,对应落体下落的距离是0~8 cm。则得到的仪器测量高度偏差为0.19 cm,对应的重力垂直梯度归算误差为0.6 μGal(取地表平均梯度为3 μGal/cm)。考虑到目前梯度测量的精度,可以认为这个梯度归算误差属于正常误差范围。结果表明,初速度很小可以忽略时,这4种方法计算出来的仪器测量高度一致。
表 1 4种算法得到的仪器测量高度(g0=9.8 m/s2, Hi=0.8 m)Table 1. Measurement Heights of the Four Algorithms(g0=9.8 m/s2, Hi=0.8 m)算法 相关参数 测量高度Hr/m Zumberge t2=0.128 s 0.773 2 Niebauer t2=0.128 s 0.771 3 Timmen A=56.0,B=102.4
C=61.2,D=14.0
E=1.0,F=112.0
G=168.0,H=67.2
I=5.6,t1=0.0 s
t2=0.128 s0.771 3 本文算法 t1=0 s
t2=0.128 s0.773 2 2.2 起始计算时刻从0~50 ms变化时各算法计算结果对比
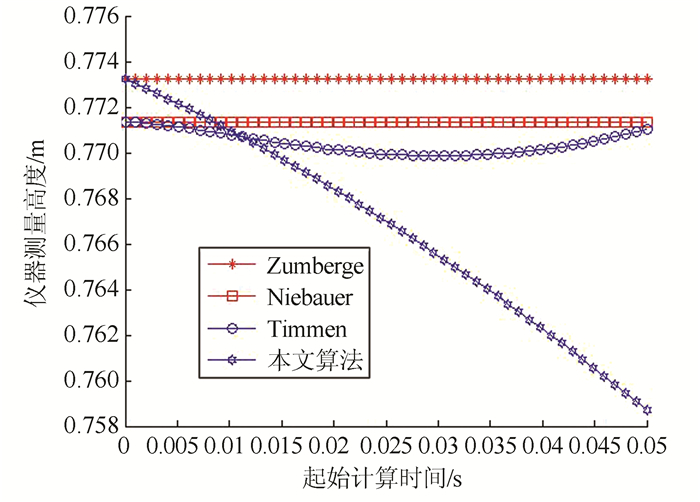
考虑到在自主研发绝对重力仪器的实际工作中,落体自由下落轨迹重建算法是在基于落体下落过程中形成的干涉条纹信号过零信息提取的基础上完成的[20]。刚开始下落时,由于落体速度较慢,形成的干涉条纹瞬时频率较小,故干涉条纹过零点位置容易受到干扰,使得计算得到的落体时间位移坐标误差较大。因此, 可将落体开始运行后几十ms的数据删除,即落体开始运行速度较慢的数据不参与后期计算。但开始计算时落体对应的初速度不能忽略(笔者构建的激光干涉绝对重力仪落体起始运动时间设定为50 ms,此时对应的落体运动速度为0.49 m/s)。这种情况下再次对比4种算法的计算结果,如图 2所示。在本次计算中落体初始位置重力加速度g0、仪器高度Hi以及相关参数均与表 1一致,仅测量的初始时间t1有变化。
![]() 图 2 不同起始时间和固定下落高度下的4种算法计算仪器高度Figure 2. Measurement Heights of the 4 Algorithms for Different Beginning Time With Fixed Drop Height
图 2 不同起始时间和固定下落高度下的4种算法计算仪器高度Figure 2. Measurement Heights of the 4 Algorithms for Different Beginning Time With Fixed Drop Height从图 2中可以看出,Zumberge、Niebauer、Timmen和本文提出的计算方法在t1非常接近于0(t1<0.015 s)时偏差较小,具有较好的一致性,最大偏差小于3 mm,引入的最大梯度归算误差不超过1 μGal。但随着t1的不断增加,即落体的初速度逐渐变大,从落体开始下落到开始计算位置之间的距离也在不断变大,即仪器的测量高度应不断变小。
对比图 2中4条曲线,Zumberge、Niebauer和Timmen的算法结果近似等于常量。而本文算法因为考虑了落体开始计算时的速度对仪器测量高度的影响,计算结果随着起始计算时间的增加(或者说随着开始计算是落体初始速度的增加)而不断减小。
由此可见, 本文提出的算法在t1较小的时候与其他3种算法的结果保持了较好的一致性。随着t1增加,本文算法计算得到的仪器测量高度不断减小,更具合理性。
2.3 落体自由下落长度不同时各算法计算结果对比
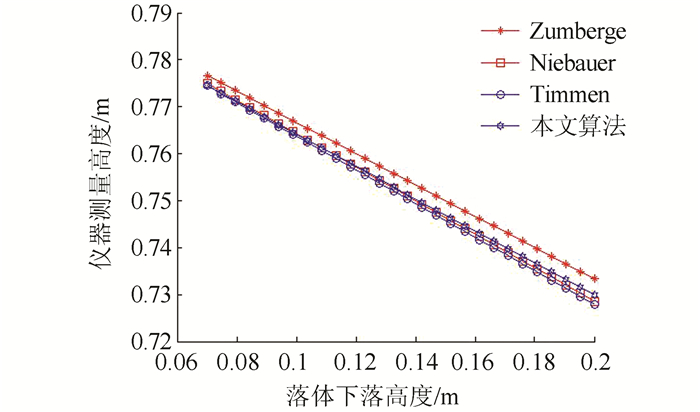
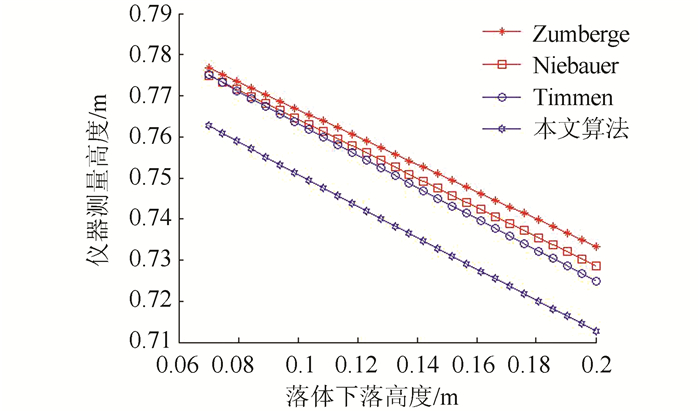
考虑落体下落的距离在7~20 cm间变化,变化步长为0.5 cm。本文算法和Timmen算法均需要知道落体下落的开始和结束的时刻,根据落体下落的距离可以计算出落体下落的结束时刻。为了更好地对比,将落体下落的起始计算时刻分别设定为0.01 s和0.05 s,如图 3、4所示。
![]() 图 3 起始时间为0.01 s时不同下落高度的4种算法计算结果Figure 3. Measurement Heights of the 4 Algorithms for Different Drop Height While the Beginning Time is 0.01 s
图 3 起始时间为0.01 s时不同下落高度的4种算法计算结果Figure 3. Measurement Heights of the 4 Algorithms for Different Drop Height While the Beginning Time is 0.01 s![]() 图 4 起始时间为0.05 s时不同下落高度的4种算法计算结果Figure 4. Measurement Heights of the 4 Algorithms for Different Drop Height While the Beginning Time is 0.05 s
图 4 起始时间为0.05 s时不同下落高度的4种算法计算结果Figure 4. Measurement Heights of the 4 Algorithms for Different Drop Height While the Beginning Time is 0.05 s对比图 3和图 4可以发现,本文算法与已有算法相比,对应落体不同的下落高度,仪器测量高度计算结果的变化趋势相同。在起始时间较小,落体初始速度可以忽略的情况下(图 3),本文算法与Niebauer、Timmen算法的结果非常接近,可以确定Zumberge算法存在0.5 μGal的重力梯度修正误差; 而当起始时间较大,落体的初始速度不能忽略时(图 4),本文算法给出的结果整体偏小约2 cm,此时得到的重力梯度修正误差将偏大6 μGal,这个结果更具合理性。
3 结语
Zumberge、Niebauer和Timmen提出的算法在落体下落的初始速度较小,即落体下落时间范围为0~0.015 s时,计算出的仪器测量高度一致性较好,特别是Niebauer、Timmen两种算法,一致性小于1 mm。本文提出的算法结果与他们的结果比较吻合。但是随着初始计算时间t1的增加,前面3种算法基本保持一致,而本文算法的结果具有较大的偏差,给出的仪器测量结果逐渐变小。
综上所述,当落体下落速度比较小时,仪器自振、环境脉动以及可能存在的电噪声均对干涉条纹的影响不大,当不会影响落体下落轨迹时间位移坐标提取误差的时候,可以将起始计算时间尽量缩短,此时这4种算法给出的仪器测量高度差别不大。而Zumberge、Niebauer和Timmen提供的算法就是针对起始时间接近于0的情况设计的。
但是在自主开发绝对重力仪的过程中,落体运动速度比较低时, 仪器自振、环境脉动以及可能存在的电噪声对干涉条纹的影响较大,已经影响了落体下落轨迹上低速段时间位移坐标的精度。考虑到这种实际情况,需要将落体开始下落之后较长一段时间内的干涉条纹摒弃,不用于最终结果计算(一般是将0~0.05 s这段时间的干涉条纹舍弃),此时本文算法具有更大的优势。
-
![]()
图 2 不同起始时间和固定下落高度下的4种算法计算仪器高度
Figure 2. Measurement Heights of the 4 Algorithms for Different Beginning Time With Fixed Drop Height
![]()
图 3 起始时间为0.01 s时不同下落高度的4种算法计算结果
Figure 3. Measurement Heights of the 4 Algorithms for Different Drop Height While the Beginning Time is 0.01 s
![]()
图 4 起始时间为0.05 s时不同下落高度的4种算法计算结果
Figure 4. Measurement Heights of the 4 Algorithms for Different Drop Height While the Beginning Time is 0.05 s
表 1 4种算法得到的仪器测量高度(g0=9.8 m/s2, Hi=0.8 m)
Table 1 Measurement Heights of the Four Algorithms(g0=9.8 m/s2, Hi=0.8 m)
算法 相关参数 测量高度Hr/m Zumberge t2=0.128 s 0.773 2 Niebauer t2=0.128 s 0.771 3 Timmen A=56.0,B=102.4
C=61.2,D=14.0
E=1.0,F=112.0
G=168.0,H=67.2
I=5.6,t1=0.0 s
t2=0.128 s0.771 3 本文算法 t1=0 s
t2=0.128 s0.773 2  下载: 导出CSV
下载: 导出CSV
-
[1] Zumberge M A, Rinker R L, Faller J E. A Portable Apparatus for Absolute Measurements of the Earth's Gravity[J].Metrologia, 1982, 18:145-152 doi: 10.1088/0026-1394/18/3/006
[2] 胡华, 伍康, 申磊, 等, 新型高精度绝对重力仪[J].物理学报, 2012, 61(9):541-549 http://www.doc88.com/p-1488749490760.html Hu Hua, Wu Kang, Shen Lei, et al. A New High Precision Absolute Gravimeter[J].Acta Phus. Sin., 2012, 61(9):541-549 http://www.doc88.com/p-1488749490760.html
[3] 滕云田, 吴琼, 郭有光, 等.基于激光干涉的新型高精度绝对重力仪[J].地球物理学进展, 2013, 28(4):2141-2147 doi: 10.6038/pg20130459 Teng Yuntian, Wu Qiong, Guo Youguang, et al. New Type of High-Precision Absolute Gravimeter Base on Laser Interference[J]. Progress in Geohpys, 2013, 28(4):2141-2147 doi: 10.6038/pg20130459
[4] Giancarlo D, Sergio D, Alessandro G, et al. The New IMGC-02 Transportable Absolute Gravimeter:Measurement Apparatus and Applications in Geophysics and Volcanology[J]. Annals of Geophysics, 2008, 51(1):39-49 http://www.oalib.com/paper/2577777
[5] Olivier F, Henri B, Tomas V, et al. The European Comparison of Absolute Gravimeters 2011(ECAG-2011) in Walferdange, Luxembourg:Results and Recommendations[J]. Metrologia, 2013, 50:257-268 doi: 10.1088/0026-1394/50/3/257
[6] Faller J E. The Measurement of Little G:A Fertile Ground for Precision Measurement Science[J]. J. Res. Natl. Inst. Stand. Technol, 2005, 110:559-581 doi: 10.6028/jres
[7] Liard J, Gagnon C. The New A-10 Absolute Gravimeter at the 2001 International Comparison of Absolute Gravimeters[J]. Meterologia, 2002, 39:477-483 doi: 10.1088/0026-1394/39/5/8
[8] 张善法, 孟令顺, 杜晓娟, 等.高精度重力测量在金矿采空区探测中的应用研究[J].地球物理学进展, 2009, 24(2):590-595 http://www.docin.com/p-504485343.html Zhang Shanfa, Meng Lingshun, Du Xiaojuan, et al. Study on the Application of High Precision Gravity Survey in Detecting Mined-Out Areas of Gold Mines[J]. Progress in Geophys, 2009, 24(2):590-595 http://www.docin.com/p-504485343.html
[9] 程力, 张雅杰, 蔡体菁.重力辅助导航匹配区域选择准则[J].中国惯性技术学报, 2007, 15(5):559-563 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=zgxj200705011&dbname=CJFD&dbcode=CJFQ Cheng Li, Zhang Yajie, Cai Tijing. Selection Criterion for Matching Area in Gravity Aided Navigation[J]. Journal of Chinese Inertial Technology, 2007, 15(5):559-563 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=zgxj200705011&dbname=CJFD&dbcode=CJFQ
[10] 游泽霖, 徐菊生.精密绝对重力测量在地震研究中的应用[J].地壳形变与地震, 1984, 4(4):410-414 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=dkxb198404014&dbname=CJFD&dbcode=CJFQ You Zelin, Xu Jusheng. Application of Precise Absolute Gravimeter in Earthquake Studies[J]. Crestal Deformation and Earthquake, 1984, 4(4):410-414 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=dkxb198404014&dbname=CJFD&dbcode=CJFQ
[11] Williams S D P, Baker T F, Jeffries G. Absolute Gravity Measurements at UK Tide Gauges[J]. Geophysical Research Letters, 2001, 28(12):2317-2320 doi: 10.1029/2000GL012438
[12] D'Agostino G, Desogus S, Germak A, et al. The New IMGC-02 Transportable Absolute Gravimeter:Measurement Apparatus and Applications in Geophysics and Volcanology[J]. Annals of Geophysics, 2008, 51(1):39-49 https://www.researchgate.net/publication/285873158_The_new_IMGC-02...
[13] Vilibic I. Global Sea Level Rise? New Techniques for the Absolute Sea Level Measurement[J]. Geofizika, 1997, 14:119-131 https://www.ipcc.ch/ipccreports/far/wg_I/ipcc_far_wg_I_chapter_09.pdf
[14] Hinderer J N, Florsch J, Makinen H L, et al. On the Calibration of a Superconducting Gravimeter Using Absolute Gravity Measurements[J]. Geophys Jour. Int, 1991, 106(2):491-497 doi: 10.1111/gji.1991.106.issue-2
[15] D'Agostino G, Germak A, Desogus S, et al. A Method to Estimate the Time-Position Coordinates of a Free-Falling Test-Mass in Absolute Gravimetry[J]. Institute of Physics Publishing, 2005, 42:233-238 http://adsabs.harvard.edu/abs/2005Metro..42..233D
[16] Zumberge M A. A Portable Apparatus for Absolute Measurements of the Earth's Gravity[D]. Colorado:University of Colorado, 1981
[17] Niebauer T M. The Effective Measurement Height of Free-Fall Absolute Gravimeters[J]. Metrologia, 1989, 26:115-118 doi: 10.1088/0026-1394/26/2/005
[18] Timmen L. Precise Definition of the Effective Measurement Height of Free-Fall Absolute Gravimeters[J], Metrologia, 2003, 40:62-65 doi: 10.1088/0026-1394/40/2/310
[19] 吴琼, 滕云田, 黄大伦, 等.绝对重力仪研制中一种新的自由落体轨迹重建算法[J].地震学报, 2012, 34(4):549-556 http://www.cqvip.com/QK/93548X/201204/42541020.html Wu Qiong, Teng Yuntian, Huang Dalun, et al. A New Type of Algorithm for Rebuilding the Trace of Free-Fall Body in Absolute Gravimeter Development[J]. Acta Seismologica Sinica, 2012, 34(4):549-556 http://www.cqvip.com/QK/93548X/201204/42541020.html
[20] Char B W, Geddes K O, Gonnet G H, et al. First Leaves:A Tutorial Introduction to Maple V[M]. New York:Springer-Verlag, 1992
-
期刊类型引用(3)
1. 王嘉沛,韩宇飞,张新林,李忠亚,张明辉,祝杰,杨光亮,胡敏章,申重阳. 我国绝对重力观测应用与研究进展. 地球与行星物理论评(中英文). 2025(03): 243-257 .  百度学术
百度学术
2. 黄诗,朱小毅,薛兵,张兵,吴旭. 自由落体绝对重力仪中参考棱镜振动测量技术. 地震. 2024(01): 50-63 . 百度学术
3. 吴燕雄,滕云田,吴琼,徐行,张兵. 船载绝对重力仪测量系统的误差修正模型及不确定度分析. 武汉大学学报(信息科学版). 2022(04): 492-500 . 百度学术
其他类型引用(3)
计量
- 文章访问数: 1233
- HTML全文浏览量: 149
- PDF下载量: 328
- 被引次数: 6






