 2015, Vol. 40
2015, Vol. 40文章信息
- 詹银虎, 郑勇, 张超, 张中凯, 李铸洋, 马高峰
- ZHAN Yinhu, ZHENG Yong, ZHANG Chao, ZHANG Zhongkai, LI Zhuyang, MA Gaofeng
- 球面圆拟合算法及其在测月定向中的应用
- Spherical Circle Fitting Algorithm and Its Application on Azimuth Determination by Observing the Moon
- 武汉大学学报·信息科学版, 2015, 40(11): 1514-1519
- Geomatics and Information Science of Wuhan University, 2015, 40(11): 1514-1519
- http://dx.doi.org/10.13203/j.whugis20130562
-
文章历史
- 收稿日期: 2014-04-26






2. 信息工程大学地理空间信息学院, 河南 郑州, 450052
2. Institute of Geography and Space Information, Information Engineering University, Zhengzhou 450052, China
快速定向是一种短时间内确定地面目标方位的技术,作为现代化测绘科学的一部分,其在交通、水利、建筑、管线等领域均有广泛应用。特别是航天器的隐蔽发射与自主导航等,均需要配套的快速定向装备进行保障。
天文定向是依靠天空中的自然天体测定地面目标方位的一种技术,是快速定向的一种有效手段。因其精度高且是一种绝对定向手段,往往作为真北基准,对陀螺仪和GPS等定向设备进行标较,具有无法替代性。但天文定向具有受天气影响严重的缺点,往往在阴天和浓雾天气条件下都不能进行观测。文献[1, 2]提出了利用北极星等特征星进行天文定向,获得了较高精度的定向结果;文献[3]提出了利用任意恒星实现天文定向,在一定程度上摆脱了夜间天文定向对特征星的依赖;文献[4]提出了利用太阳系行星进行天文定向,使得天文定向可在黄昏和黎明等特殊时段实现;文献[5]提出了白天测日快速定向,实现了全天时天文定向。
月球是夜晚天空中最亮的自然天体,在云雾天气状况下可见性依然较强,是非常好的定向观测目标。但月球有月相的变化,其在绝大部分时间呈现的是一个圆缺面,因此,如何确定月面中心是测月定向的关键所在。文献[6]提出了一种基于月球边沿采样的月球视面中心拟合算法,解决了月球视面中心的确定问题,并实现了较高精度的测月定向。上述月球视面中心拟合算法在建立月面坐标系及进行月球视面中心拟合时,认为月球的视面为平面,实际上月球的视面是一个球面,是整个天球上很小的一部分,因其面积足够小,才将其近似看作平面。
本文提出了一种球面圆拟合算法,利用该算法进行月球视面中心拟合时,避开了复杂的球面坐标与直角坐标的变换,以及测量坐标系与月面坐标系的变换。该算法具有算法严密、计算流程简单和计算量小的优点。
1 测月定向原理图 1中,O为测站中心,OL为月球视面中心。地面目标B的天文方位角AB是从北点N按顺时针量取至目标的水平角,范围为0°~360°[7]。设在某概略坐标已知的测站,采用经纬仪或全站仪观测地面目标B得到水平度盘值为MB,观测月球得其视面中心OL的水平度盘值为ML,同时记录下测瞬时刻T,并以T为引数计算出月球视面中心的真实方位角AL[8]。则只需解算出北点N的水平度盘值ΔM即可完成定向,即



|
| 图 1 测月定向原理图 Fig. 1 Principle of Azimuth Determination by Observing the Moon |
由于月球视面中心无法直接照准观测,使得ML不能直接获取,需要特殊的观测方法和算法来实现。
2 球面圆拟合算法月球的几何平均扁率仅为0.002,在地月之间384 400 km的尺度上,月球视圆面的半径约为15′,可以将其看作一个正圆[9, 10, 11]。若利用电子经纬仪对月球明亮边沿进行观测采样,则可获取月球视面的几何信息,利用本文提出的球面圆拟合算法即可解算其中心位置。
2.1 观测方法如图 2所示,按照一定的空间顺序,用经纬仪或全站仪的十字丝中心对月球明亮且光滑的边沿进行多次采样,每次采样的记录采样时刻 Tk,水平角Mk和高度角Hk。当采样点只有3个时,恰好能确定月球视面中心;当采样点多于3个时,具有多余观测,可利用最小二乘法拟合月球视面中心[12]。采样点需要尽量均匀的分布在边沿上。

|
| 图 2月球视面边沿测量示意图 Fig. 2 Observing Method of the Moon’s Apparent Edge |
上述采样点对应不同的观测时刻,需要换算到统一的历元。历元归算的基本原理是:在较短的时间内,认为月球视面没有围绕圆心的自旋运动,月球视面中心的坐标变化与月球视面边沿的坐标变化相等。采用星空模拟软件 Stellarium模拟月球视面的自旋运动,测站及观测时间的设定均与§4的实验一致,结果显示月球视面的自旋速率约为14.5″/s。月球的视面半径大约只有15′,1 s的自旋运动对水平角或高度角的最大影响约为0.063″,平均影响约为0.044″。而全站仪测角精度为角秒量级,因此,在1~5 s的时间内可以忽略月球视面的自旋运动。
如图 3所示,阴影部分表示月相。从观测历元 T1到T2,月球视面中心的位置从O1运动到O2,某采样点的位置从S1移动至S2。若T1和T2的时间间隔很短,只有5 s,则可认为S1和O1点的相对位置没有变化,两者呈一个整体作周日视运动,因此,月球视面中心和边沿采样点的地平坐标变化是相同的,可按以下公式计算:


|
| 图 3历元归算原理图 Fig. 3 Principle of Epoch Unification |
式中,A(T1)、A(T2)表示月球视面中心在历元T1和T2的方位角;H(T1)和H(T2)表示月球视面中心在历元T1和T2的高度角,均能以历元为引数,根据测站的位置计算得到。则将历元T2的边沿采样数据(M2,H2)归算到历元T1后为:

高度角化为天顶距后为:

在实际测量中,被归算的历可能与归算历元相隔达到分钟量级,因为即使熟练的观测者对月球边沿的一次完整采样也需要耗时大约1 min。此时不妨将时间间隔以5 s为步长进行细分,分步进行历元归算。将所有采样点的观测数据归算到统一历元后,采样点序列可清晰反映月球视面的正圆特征。但此时月球视面的正圆性质是通过球面坐标形式表现的,无法直接采用平面圆拟合公式确定中心[13, 14]。
2.3 球面圆拟合算法如图 4所示,阴影部分表示月相。 Z为测站天顶,Sk为历元归算后的某采样点Sk,OL为月球的视面中心,它们构成了球面三角形。Sk的水平角°Mk和天顶距Z°k由观测值通过历元归算获得,OL的水平角ML、天顶距ZL及月球视半径r为未知参数,需要计算得到。根据球面三角形边的余弦公式可得[15]:


|
| 图 4球面三角形 Fig. 4Sketch of Spherical Triangle |
给定参数近似值为 X 0=( ML0 ZL0 r 0)T,对误差方程线性化:

各系数项为:
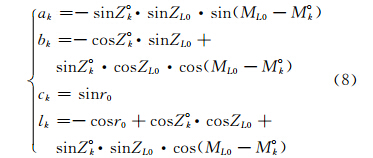
假设有n个采样点,不妨令
若每次采样均为等精度观测,则


单位权中误差μ及 的权逆阵 Q 表示为:

故ML、ZL和r的精度估计公式为:

实际计算中,上述过程一般需要迭代计算。但迭代收敛过程极快,一般只需迭代2~3次即可使结果收敛到0.1″以内。
基于球面圆拟合算法的月球视面中心确定流程如图 5所示。

|
| 图 5 面中心拟合算法流程图 Fig. 5 Flowchart of the Fitting Algorithm |
与文献[6]相比,本文提出的球面圆拟合算法流程更为简单,计算量更小,在工程实践中更容易实现。
3 月相姿态对拟合精度的影响对于相同的时刻,观测者在全球任意位置看到的月相基本是相同的,但不同地点的观测者观测到的月相的空间姿态是不一样的。此外,即使是在同一地点,随着时间的推移,月相的空间姿态也会发生变化。无论是平面圆拟合,还是球面圆拟合,圆心的拟合精度均与边沿采样点序列的空间分布密切相关。而月相的空间姿态决定了采样点序列的空间分布,所有月相的空间姿态直接决定了月球视面中心的拟合精度。
3.1 月相姿态的定义下面将模拟3种具有代表性的月相姿态,用以研究月相对月球视面中心拟合精度的影响。
如图 6所示的新月,定义月相的弦为明亮且光滑边沿弧段所对应的直线段,在图中用虚直线表示。根据弦与水平面的关系,定义上述3种姿态对应的月相分别为平弦月、竖弦月和斜弦月。对于盈凸月,月相的弦的定义及姿态的定义与上述相同。

|
| 图 6 月相姿态 Fig. 6 Attitudes of the Moon Phase |
如图 7所示,O为测站位置,o为月球视面中心,以o为原点,以月球视面为平面建立直角坐标系o-xy,直线Oo与平面o-xy垂直。取模拟月球的半径为1 m,则月球视面边沿上的点坐标可表示为:

|
| 图 7 模拟测月图 Fig. 7 Simulation of Observing the Moon |
月球的真实视半径是不断变化的,约为15′。不失一般性,取O点观测到的模拟月球的视半径为15′,则观测距离。则采样点的无误差的水平角和垂直角观测量为:

式中,atan()为反正切函数。其他仿真条件如下。
1) 3种模拟姿态下,月相明亮且光滑边沿的弧长相等,均为半个圆周长。在对月相进行连续跟踪观测后发现,从眉月到盈凸月,月相的明亮面积逐步增加,但其明亮且光滑边沿的弧长基本稳定在半个圆周长左右;
2) 每次对3种姿下的月相采样次数相等,均为20次;
3) 模拟观测水平角和高度角的中误差m=±3.0″,这是目前徕卡等高精度经纬仪或全站仪,采用静态测量模式观测恒星等自然天体的实际测角精度[16]。
3.3 拟合结果对上述3种月相姿态进行100次模拟测量,获取100组模拟采样数据,再利用本文提出的球面圆拟合算法进行球面圆拟合。统计每一次的拟合中误差,最后取平均值列入表 1,并与满月数据作对比。
| 月相姿态 | m M L | m H L | m r |
| 平弦月 | ±0.9″ | ±2.1″ | ±1.5″ |
| 竖弦月 | ±2.1″ | ±0.9″ | ±1.5″ |
| 斜弦月 | ±1.7″ | ±1.7″ | ±1.5″ |
| 满 月 | ±1.2″ | ±1.2″ | ±0.9″ |
由表 1可知,平弦月时,水平角的拟合精度要明显高于高度角;竖弦月时,高度角的拟合精度要明显高于水平角,这一仿真结果与文献[6]的实测数据分析结果相吻合;斜弦月时,水平角和高度角的拟合精度相当。
对比分析月球视半径的拟合精度还可以发现,月球视半径的拟合精度与月相的姿态没有关系,只与采样点构成的弧长有关,弧长越长,拟合精度越高。此外,满月时的水平角和高度角拟合精度明显高于残月,因为满月时采样点可以均匀地分布于整个圆周上,提供的几何信息完整。
根据以上分析可以预见,新月时月相明亮且光滑边沿的弧段过短,采用最小二乘法拟合圆心会出现病态问题。因为采样点仅局部分布于圆周上,无法反映整体的圆周信息。有偏估计理论是解决病态问题的有利工具,国内外诸多学者进行了广泛而深入的研究,取得了大量成果,并在实践中得到成功应用[17, 18]。这里不再深入研究如何使用有偏估计理论解决圆拟合的病态问题。
4 实际应用为验证本文提出的球面圆拟合算法的可靠性,利用Y/JGT-01型天文测量系统进行实际观测实验。该系统利用天文计时器接收卫星信号进行天文授时;利用电子经纬仪的自动测量及自动补偿技术完成了各项人工改正及记录;利用计算机内部始终进行比时、守时和计时;利用智能软件系统完成天文测量的自动化及数据处理。该系统天文定位精度可达±0.3″,定向精度可达±0.5″,但定向只能通过观测北极星实现。
在将测月定向功能成功扩展于Y/JGT-01型天文测量系统后,参照北极星定向的观测方法,制定1个时段的测月定向观测步骤如下[19]。
1) 观测地面目标:用望远镜的纵丝连续照准地面目标3次,进行测量;
2) 观测月球:对月球视面明亮且光滑的边沿按顺序进行采样,采样点尽量分布平均,采样次数依边沿的长短而定,一般不少于10~12次;
3) 转换度盘,再次观测月球,其观测方法同步骤2);
4) 观测地面目标,观测方法与步骤1)相同。
重复上述步骤,进行多个时段的观测和比较。各时段地面目标方向的解算方法和精度估计方法同北极星任意时角法相似。2011-7-16在华北地区某天文坐标已知的测站,首先采用北极星任意时角法标定一条固定基线(长度l=110 m)的天文方位角为A=12°36′4.8″,然后进行5个时段的测月定向观测实验。对相同的观测数据,分别采用文献[6]中的月球视面中心拟合算法和本文提出的球面圆拟合算法进行定向解算,解算出的地面目标的天文方位角A1、A2及其中误差mA1、mA2,以及与准确天文方位角之差ΔA1、ΔA2如表 2所示。
| 时段 | A 1 | m A 1 | Δ A 1 | A 2 | m A 2 | Δ A 2 |
| 1 | 12°36′07.0″ | ±2.2″ | +2.2″ | 12°36′06.3″ | ±2.1″ | +1.5″ |
| 2 | 12°36′08.4″ | ±2.4″ | +3.6″ | 12°36′07.0″ | ±2.3″ | +2.2″ |
| 3 | 12°36′09.0″ | ±2.1″ | +4.2″ | 12°36′07.8″ | ±2.2″ | +3.0″ |
| 4 | 12°36′06.8″ | ±2.1″ | +2.0″ | 12°36′09.3″ | ±1.9″ | +4.5″ |
| 5 | 12°36′07.8″ | ±2.6″ | +3.0″ | 12°36′06.3″ | ±2.7″ | +1.5″ |
| 均值 | 12°36′07.8″ | ±1.0″ | +3.0″ | 12°36′07.3″ | ±1.0″ | +2.5″ |
由表 2可知,两种拟合算法的定向内符合精度相等,天文方位角单个时段的内符合精度约为±2.0″~3.0″,5个时段平均天文方位角的内符合精度为±1.0″。但利用本文提出的方法获得了更高的外部检核精度,精度提高了大约0.5″。这也说明本文提出的球面圆拟合算法更为准确、严密,建议在工程实践中采用本文提出的算法进行测月定向。
此外,上述两种定向结果存在2″~3″的系统性偏差。分析原因,可能是因为定向解算时测站坐标采用的是GPS导航坐标,而非准确的天文坐标,即测站位置误差产生了定向误差。
| [1] | Lambrou E, Pantazis G. Astronomical Azimuth Determination by the Hour Angle of Polaris Using Ordinary Total Stations[J]. Survey Review, 2008, 40(308): 164-172 |
| [2] | Balodimos D D, Korakitis R, Lambrou E, et al. Fast and Accurate Determination of Astronomical Coordinates Φ, Λ and Azimuth, Using a Total Station and GPS Receiver[J]. Survey Review, 2003, 37(290): 269-275 |
| [3] | Zhang Chao, Zheng Yong, Li Changhui. Research on Astronomy Orientation by Using the Random Star[J]. Science of Surveying and Mapping, 2005,30(4): 30-32(张超, 郑勇, 李长会. 用任意星进行天文定向的研究[J].测绘科学,2005,30(4): 30-32) |
| [4] | Zhan Yinhu, Zhang Chao, Hua Yuesheng, et al. Research on Fast Astro-Geodetic Orientation by Observing Planets. Journal of Geomatics Science and Technology, 2011,28(5): 338-341(詹银虎, 张超, 华跃升, 等.利用行星进行快速天文定向[J].测绘科学技术学报,2011,28(5):338-341) |
| [5] | Zhan Yinhu. Theory and Technology Research on Fast Orientation Based on Celestial Bodies[D]. Zhengzhou: Information Engineering University, 2012 (詹银虎.基于自然天体的快速定向理论及技术研究[D]. 郑州:信息工程大学,2012) |
| [6] | Zhan Yinhu, Zhang Chao, Zheng Yong, et al. A Fitting Algorithm of the Apparent Moon Center and Its' Application on Fast Orientation[J]. Acta Geodaetica et Cartographica Sinica, 2012, 41(3): 353-358 (詹银虎,张超,郑勇,等.月球视面中心拟合算法及其在测月快速定向中的应用[J].测绘学报,2012,41(3):353-358) |
| [7] | Zhang Hanwei, Xu Houze, Wang Aisheng. The Basic Principal of Measuring Astronomical Longitude, Latitude and Azimuth Angle[J]. Science of Surveying and Mapping, 2006, 31(4): 157-160(张捍卫, 许厚泽, 王爱生. 天文经纬度和天文方位角测定的基本原理[J]. 测绘科学, 2006, 31(4): 157-160) |
| [8] | John B, Wendy P, Kaplan G, et al. User's Guide to NOVAS Version C3.0[R].US Naval Observatory,Washington D C, 2009 |
| [9] | Liu Jingnan, Wei Erhu, Huang Jinsong, et al. Applications of Selenodesy to Lunar Detection[J]. Geomatics and Information Science of Wuhan Univers, 2005, 30(2): 95-100(刘经南, 魏二虎, 黄劲松, 等. 月球测绘在月球探测中的应用[J]. 武汉大学学报·信息科学版, 2005, 30(2): 95-100) |
| [10] | Chen Junyong. Progress in Lunar Geodesy[J].Journal of Geodesy and Geodynamics, 2004,24(3): 1-6(陈俊勇.月球大地测量学的进展[J]. 大地测量与地球动力学, 2004, 24(3): 1-6) |
| [11] | Li Fei, Yan Jianguo. Principle and Method of Lunar Gravity Field Determination and Project on Self-determinational Lunar Gravity Field[J]. Geomatics and Information Science of Wuhan Univers, 2007, 32(1): 6-10(李斐, 鄢建国. 月球重力场的确定及构建我国自主月球重力场模型的方案研究[J]. 武汉大学学报·信息科学版, 2007, 32(1): 6-10) |
| [12] | Huang Weibin. Principles and Applications of Contemporary Adjustment[M]. Beijing: People's Liberation Army Press, 1992(黄维彬. 近代平差理论及其应用[M]. 北京: 解放军出版社, 1992) |
| [13] | Gander W, Golub G H, Strebel R. Least-Square Fitting of Circles and Ellipses[J]. BIT Numerical Mathematics, 1994, 34(4): 558-578 |
| [14] | Sung J A, Wolfgang R, Hans J W. Least-Squares Orthogonal Distances Fitting of Circle,Sphere,Ellipse,Hyperbola and Parabola[J].Pattern Recognition, 2001, 34: 2 283-2 303 |
| [15] | Xia Yifei, Huang Tianyi. Spherical Astronomy[M]. Nanjing: Nanjing University Press, 1995(夏一飞, 黄天衣. 球面天文学 [M]. 南京: 南京大学出版社, 1995) |
| [16] | Zhang Chao. System-level Development and Application Research on Astronomic Surveying System Based on Electronic Theodolites[D]Zhengzhou: Information Engineering University, 2009(张超. 基于电子经纬仪的天文测量系统及应用研究[D]. 郑州: 信息工程大学, 2009) |
| [17] | Hansen P C.Regularization Tools: A Matlab Package for Analysis and Solution of Discrete Ill-posed Problems[J]. Numerical Algorithn, 1994, 6: 1-35 |
| [18] | Hansen P C. Analysis of the Discrete Ill-posed Problems by Means of the L-curves[J].SIAM Review, 1992, 34: 561-580 |
| [19] | State Bureau of Technology and Quality Supervision. GB/T 17943-2000 Specifications for the Geodetic Astronomy[S]. Beijing: Standards Press of China, 2000(国家质量技术监督局. GB/T 17943-2000大地天文测量规范[S]. 北京: 中国标准出版社, 2000) |